



ハンガーでは連日、MuPAL-αを使ったエミュレーションが行なわれています。
具体的に何をしているのかというと、オートパイロットを開発中なのです。
次世代運航システムの研究の中で、フライト中に他機と衝突や接近の危険がある場合、自動的にそれを判断して他機を避けるような経路に誘導するシステムの研究が進められています。その一環で、誘導システムの一部となる経路追従用のオートパイロット機能の開発を行っています。
オートパイロットは、指定された姿勢や速度等を保持するように自動的に操縦してくれるシステムで、旅客機等でも一般的に使われています.今回は、MuPAL-αに搭載されている実験用フライバイワイヤ(fly-by-wire)システムの装置を使い、ソフトウェアにオートパイロット機能を組み込むことによって、実験用のオートパイロットを作っています。

オートパイロットの機能を確認するため、操縦桿を動かして、わざと機体の姿勢や速度を乱します。
このとき、所定の飛行状態に戻れるかどうかを調べます。
エミュレーションでは、αは実際にフライトするわけではないので、外視界を模擬した映像を見て操縦します。

 操縦席から見ているのは、このディスプレイです。
操縦席から見ているのは、このディスプレイです。
αは実際には動きませんが、かわりに景色を変化させることで、オートパイロットや操縦桿からの入力による機体の動きをパイロットに感じさせます。
フライトが始まると、景色に加えて、機首方位、高度、対気速度も景色に重ねて表示されるようになっています(写真右)。
研究室のコンピュータ上で開発したオートパイロットのソフトウェアを、MuPAL-αのコンピュータに積みかえて動作させ、確認と修正を繰り返していきます。
コンピュータ上で開発したソフトウェアを、航空機に積んでいきなり空中で動作確認するのではなく、実際の機体(ここではα)を使って実際のハードウェアに組み込み、別のコンピュータで計算した飛行シミュレーションデータをMuPAL-αのコンピュータに流すことで飛行状態を模擬してソフトウェアの動作確認をします。この作業をエミュレーションと言います。
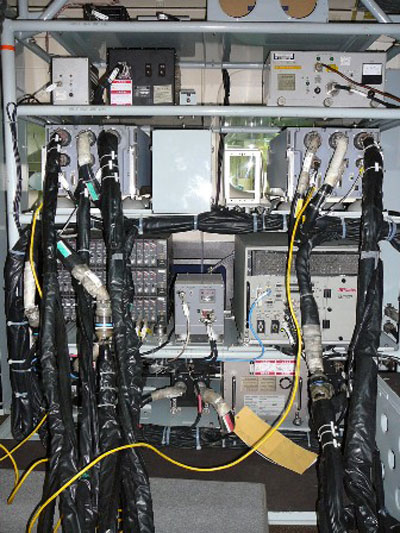
 MuPAL-α内部の計算機(写真左)。
MuPAL-α内部の計算機(写真左)。
模擬データをMuPAL-αのコンピュータに流すために、何本ものケーブルが計算機に繋がっています。
 オートパイロット機能で重要なのは、飛行状態(対気速度、機首方位、昇降率など)をスムーズかつ正確に目標値へと追従させることです。実験員は少しずつ条件を変えては確認を繰り返しています。
オートパイロット機能で重要なのは、飛行状態(対気速度、機首方位、昇降率など)をスムーズかつ正確に目標値へと追従させることです。実験員は少しずつ条件を変えては確認を繰り返しています。
この研究では、2006年夏に実際にフライトを行なっています。来年はその2回目のフライトが予定されています。

別の日のひとこま。
実験員が厚着です。
余談ですが、この季節、ハンガーの中は非常に寒くなります。
[このページを共有]