


災害時に情報収集等の目的で無人機を活用するための研究がJAXA内外で進められています。
本研究の目的は、有人機と無人機が安全かつ効率的な連携を行うためのシステムを開発することです。
今回は、無人機が要救助者を捜索し、有人ヘリコプタが救助を行う、という役割分担を想定した模擬実験を行いました。
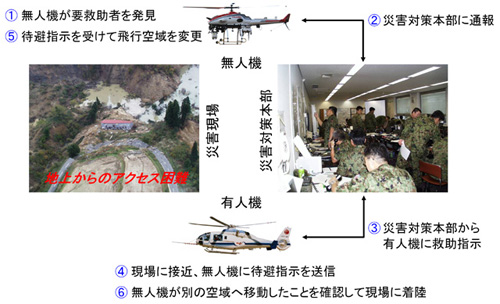 連携のシナリオです。(1)~(6)の順に、無人機運用拠点、災害対策本部、有人機パイロットの間でデータ通信による情報共有を行いながら連携作業を進めます。
連携のシナリオです。(1)~(6)の順に、無人機運用拠点、災害対策本部、有人機パイロットの間でデータ通信による情報共有を行いながら連携作業を進めます。
 システムの構成です。無人機運用拠点と災害対策本部の間のデータ通信にはJAXAの技術試験衛星「きく8号(ETS-VIII)」を使います。
システムの構成です。無人機運用拠点と災害対策本部の間のデータ通信にはJAXAの技術試験衛星「きく8号(ETS-VIII)」を使います。
飛行実験のビデオをご覧下さい。
ビデオの画面に沿って、実験の内容をご紹介していきます。
 無人機の運用は、移動可能な車両の中から行います(無人機運用拠点)。ETS-VIIIの通信端末を設置しています。
無人機の運用は、移動可能な車両の中から行います(無人機運用拠点)。ETS-VIIIの通信端末を設置しています。
 こちらは災害対策本部に通信端末を設置している様子です。
こちらは災害対策本部に通信端末を設置している様子です。
ETS-VIIIを用いた通信については、昨年12月に予備実験を実施しているので、準備作業もスムーズに進みました。
 無人機が赤外カメラを搭載して離陸します。
無人機が赤外カメラを搭載して離陸します。
 救助を求めている人がいます。林の中なので、上空からは見付けづらい状況です。
救助を求めている人がいます。林の中なので、上空からは見付けづらい状況です。
 無人機が、高度約30mで飛行しながら要救助者を捜索しています。
無人機が、高度約30mで飛行しながら要救助者を捜索しています。
 無人機運用拠点に、上空からの赤外カメラの映像が送られてきます。
無人機運用拠点に、上空からの赤外カメラの映像が送られてきます。
 要救助者を発見しました!(画面中央下に手を振っている姿が映っています)
要救助者を発見しました!(画面中央下に手を振っている姿が映っています)
 要救助者発見の通報が、災害対策本部に送られます。
要救助者発見の通報が、災害対策本部に送られます。
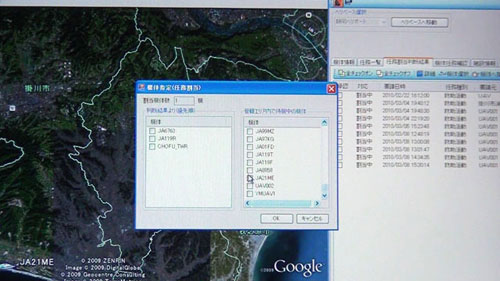 災害対策本部では、災害救援航空機情報共有ネットワーク(D-NET)の運航管理システムを使って、付近を飛行しているヘリコプタの中から最も適した機体を選んで任務を割り当てます。
災害対策本部では、災害救援航空機情報共有ネットワーク(D-NET)の運航管理システムを使って、付近を飛行しているヘリコプタの中から最も適した機体を選んで任務を割り当てます。
 有人ヘリコプタの計器板に、救助の指示が表示されます。
有人ヘリコプタの計器板に、救助の指示が表示されます。
パイロットは指示内容を確認して、現場に向かいます。
 無人機が近づいてくると、無人機を表すシンボルが◆から●に変わって、パイロットに注意を促します。
無人機が近づいてくると、無人機を表すシンボルが◆から●に変わって、パイロットに注意を促します。
 パイロットが、無人機用に割り当てられた空域と、その中を飛行中の無人機の位置を確認し、無人機運用拠点に対して待避指示を送信します。
パイロットが、無人機用に割り当てられた空域と、その中を飛行中の無人機の位置を確認し、無人機運用拠点に対して待避指示を送信します。
 無人機運用拠点で待避指示を受信すると、無人機の飛行空域を変更します。
無人機運用拠点で待避指示を受信すると、無人機の飛行空域を変更します。
画面上で、新しい飛行目標点を設定すると、無人機の割当空域が変更されます。
 無人機が別の空域に移動したことを確認し、現場への着陸を開始します。
無人機が別の空域に移動したことを確認し、現場への着陸を開始します。
 昨年度の飛行実験では、MuPAL-εは上空を飛行しただけでしたが、今回は実際に現場に着陸するところまで行いました。
昨年度の飛行実験では、MuPAL-εは上空を飛行しただけでしたが、今回は実際に現場に着陸するところまで行いました。
今回の実験により、無人機が要救助者を捜索・発見し、有人機が救助する、という連携作業を安全かつ効率的に行えることが確認できました。
実験の過程で、いくつか改善すべき点も明らかとなりました。例えば、現在のシステムでは、有人機のパイロットは無人機の位置を知ることはできますが、要救助者の位置を直接知ることができません。無人機の位置と要救助者の位置は100m程度離れていたため、現場に到着してから救助隊員が要救助者を発見するまでに時間がかかる可能性が考えられます。無人機に搭載された赤外カメラの撮影方向と地形のデータベースから要救助者の位置を計算し、その情報を有人機に送れるようになれば、救助活動をより迅速に行えるようになります。
今回の実験は、ヤマハ発動機の無人機テスト場内で行いましたが、来年度には、防災関係者等への公開による飛行実験を計画しています。
[このページを共有]