


午前中に予定していたシミュレーションの時間の調整のため、航空機運航セクションに顔を出したら、午後に予定されているMuPAL-εによる飛行実験の機長から、今日は乗らないの?と聞かれた。
MuPAL-εの後席は3つあり、ひとつは本来の実験の任務主担当者が、ひとつは計測機器の操作担当者が、そしてもうひとつには表示系操作の担当者が乗ることになっていたから、私の座る場所はないはずだ。いや、それが、と機長の曰く、任務担当者が誰も乗らないんですよ。地上の人手が足りないので、機上機器の操作は計測機器担当に任せるのだという。飛行性や操縦性の課題が多かった時代は搭乗責任者がミッションの主担当者であり、研究の責任者というのが常だったが、最近は航法や通信関連の課題が増え、実験担当者が搭乗しないケースもある。へえ、じゃあ、乗せてもらおうかな、でも、別の仕事もあるので、ちょっと調整して返事します、と言って研究室に戻ったら、本日搭乗予定の表示系担当者(註:本コーナーの編集長)が、「風邪がぶり返しました~」と、顔を半分以上覆ったマスクの向こうで情けない声を出している。今回は、プログラムもかなり変更したし、初めての場所でもあるので、別の仕事は別の同僚に任せて、表示担当バックアップとして乗せてもらうことにした。
さて、実験の主目的はシュードライトである(こちらを参照)。これまでは滑走路などの上に受信機を置いて、その上でGPS電波の送信機を載せたヘリをホバリングさせていたのだが、今回は都市部のビルの谷間を想定し、JAXAのつくば宇宙センターのビルの間に受信機を配置した。ビルの反射波の影響を調べようというわけだ。

上空から見たつくば宇宙センター
で、シュードライトと聞けば実験に便乗するのが我々のチームで、例によって高高度でホバリングするための情報を出すディスプレイをついでに評価してもらおうと計画した。地上から数メートルの高度で行う普通のホバリングでは、熟練したパイロットであれば、空中にピンでとめたような静止が可能。ただし参考となる目標の無い高々度では、そうはいかない。コンピュータグラフィックで作った計器表示によって、ホバリングのための操縦キューをパイロットに提供するのが、このディスプレイの目的である。
ただ、評価と言っても、今回はたった五分間の計測を二回だけなので、パラメータを振ったりしている場合ではない。一発勝負でちゃんとしたキューを出してやらなくては本来のシュードライトの実験に迷惑をかけてしまう。いわんや、いつもの調子で機上でデバッグをしているようなわけにはいかないのである。
さて、午前中のシミュレーションで、修正・改良点を含めた表示の確認と、パイロットの慣熟を行い、MuPAL-εは予定より五分早く13:55に離陸、筑波へ向かう。クルーは機長であるJAXAのリサーチパイロット、運航支援で来ていただいているメーカのテストパイロットと計測担当、JAXAの風邪気味の表示担当と私である。ちなみにメーカからの運航支援のお二人も、21ME導入以来のおつきあいである。

現場上空に到達。目標はどこだ?
調布を離陸後20分、目標高度2000ftを維持しつつ、ほぼ目標上空に到達した。シュードライト電波の送信を開始、地上要員と無線でコンタクトを取る。「21ME目標上空に到達」「了解、開始してください」予定より10分以上早いが地上はもう準備ができているようだ。パイロット用ディスプレイ上で赤紫色で示されるはずのホバリング目標点を探す。ない。え? 目標のビルは目の前にあるのに? レンジを切り替えてみても、やはりない。おかしい。また座標の変換を間違ったか?(註:伊勢湾実験を参照.)そうこうするうちにも機体は目標上空にさしかかる。その時、なんとディスプレイ上、自機の後ろから目標点が近づいてくるではないか。
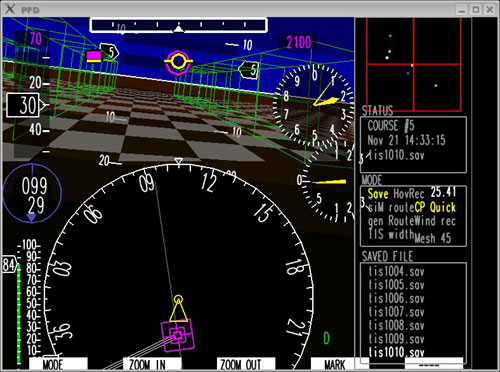
自機(黄色)後ろから近づくホバリング目標点(マゼンタの四角)
機体は前進しているのに......
ああ、これは間違いだ、座標データかプログラムがおかしい。「あ、見えてきましたね」「あっているんじゃないですか」安心したパイロット達の声が聞こえてくるが、だめだ、そっちに行ってはだめだというのに。「すみません、表示の不具合です、一旦離脱してください」精一杯落ち着いた振りをした声で報告。後席のオペレーションに絶大な信頼をおいている我らのパイロットは、即座に加速して空域を離脱する。地上への騒音被害の程度が不明なので、いつまでもホバリングを続けているわけにはいかないのだ。その間にトラブルシュートを開始。座標変換がおかしいのは間違いない。そういえばこのプログラムでは、二箇所で滑走路方位を設定することになっていたはずだ、と思いついた。実際に滑走路があるわけではないので、今回は真北つまり0度を設定している。何でこんな紛らわしい構造なんだと思いつつ、設定し忘れていた方のデータファイルの数値を書き換え、再起動、意外と簡単に片付いたと思ってディスプレイを見るが、ああ、やっぱりだめだ、状況に変化なし。しかし、ゆっくり時間をかけてデバッグをしている場合ではない。地上側の調整も、燃料の問題もある。ギブアップである。「後席の不具合解消できません。表示なしでホバリングをお願いします」、結局何しにきたのだ我々。

祈る
「りょーおかいしました」りょーの長さで、機長の失望と、同時に困難なタスクに対する気持ちの切り替えが伺える。左後席計測担当のF氏はすぐさま対策を提案する。「下方カメラで位置を誘導しましょ」MuPAL-εには、よくまあこれだけ思いついたと思えるほど様々な計測機器やら何やらが搭載されているが、空飛ぶビデオ編集室と呼ばれるほどのAV機器もそのひとつ。下向きに取り付けられたカメラで、パイロットからは見えない真下の様子を見ることも可能だ。
機体は目標地点に再度接近、管制官は、ミッションがいつまでかかるのか聞いている。厳しい発言である。未練がましく、もう一度座標データを確認。ところで、航空の世界では、角度で方位を表すときに、真北は0ではなく、360と表現する。滑走路などに書かれている数字であれば36だ。そうだ、方位0と記述した場合は特殊な処理をするようにプログラムしてあったはずだ。数値を0から360に修正してプログラムを再起動すると、おお、ディスプレイ上、ホバリング目標の表示がちゃんと正面から近づいてくるではないか。「あ、出た」「これ大丈夫そうじゃない?」。お待たせしましました。間一髪。でもまたやってしまった機上デバッグ。

蛇足ながらホバリング表示は上々の性能。
終わりよければ全てよし
[このページを共有]