- 航空技術部門について
- 研究開発
- 試験設備
- 産学連携・国際協力
- 共同・公募型研究
- イベント・お知らせ
- トピックス





2021.3.11
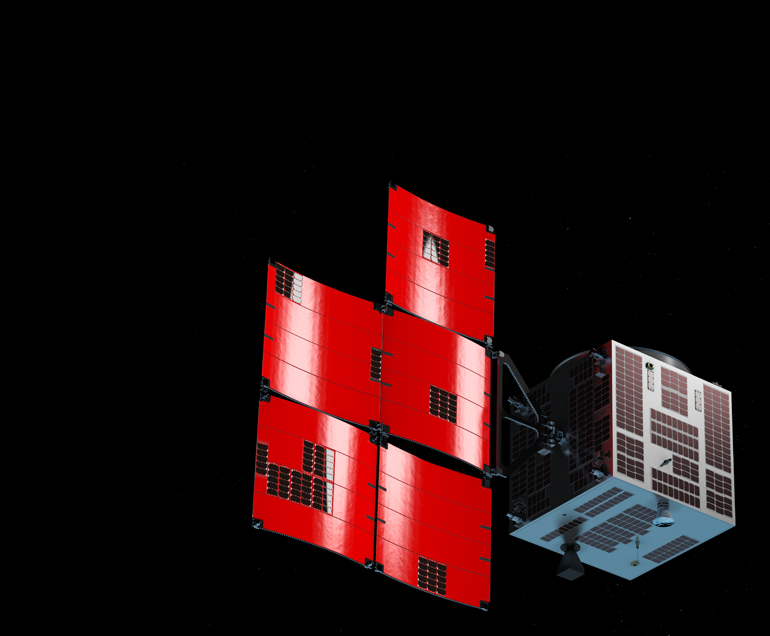
2019年10⽉、わが国は国際宇宙探査プロジェクト「⽉周回有⼈拠点(ゲートウェイ)」への参画を決定した。そして、具体的な協⼒項目案の⼀つとして、ゲートウェイへの物資・燃料補給を掲げた。補給機には、今年5⽉に最終号機が打ち上げられた国際宇宙ステーション(ISS)補給機「こうのとり」(HTV)の後継機として現在開発中の「HTV-X」の発展型が候補として検討されている。補給機はゲートウェイとランデブ・ドッキング(接近・結合)する必要があり、そこで重要になるのが補給機の「目」の役割を担うランデブ・ドッキングセンサーである。
センサーの⽅式には電波、画像、レーザーなどがあり、このうちレーザー⽅式のものをLIDAR(Light Detection andRanging)と呼ぶ。相⼿にレーザーを照射し、その反射光の⽅向や⾶翔時間(奥⾏き情報)から相⼿の3Dイメージを取得する仕組みになっている。
3Dイメージを取得するLIDARは、スキャン型とフラッシュ型に分けられる。フラッシュ型は、カメラのフラッシュのように拡散する光を使う。利点は、スキャン型と⽐べて駆動部がなく信頼性が⾼いこと。しかし、反射光が弱く計測距離が短いという⽋点があるため、「こうのとり」には海外製のスキャン型が採⽤されている。
JAXAは、この⽋点を克服したフラッシュ型の国産ランデブ・ドッキングセンサー「Flash LIDAR」の開発を進めている。克服のカギは、JAXA宇宙探査イノベーションハブと浜松ホトニクスの共同研究の成果から開発した「単⼀光⼦でも検知可能な⾼い感度」と「数センチメートルの奥⾏き分解能」を両⽴する世界初の3Dイメージセンサーチップの採⽤である。
私たちはこれまでにFlash LIDARの要素試験モデルを試作評価し、要求される性能、例えば、数百メートルにわたる広い計測範囲、数センチメートル以下の⾼い計測精度、視野に太陽が⼊っても目を回さず計測するロバスト性などを満⾜する⾒通しを得た。
今後は、HTV-Xの国際宇宙ステーションへのドッキングにおけるメーンセンサーとしての開発と実証を経て、ゲートウェイへと挑む計画だ。また本成果は、⾃動⾞の⾃動運転技術などの地上⺠⽣分野への展開も検討されている。遠い宇宙から⾝近な道路まで、広く安全を⽀える技術に育つことを願いながら開発を続けていきたい。
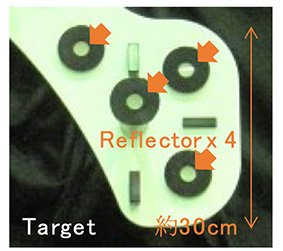
ISSに具備されているドッキングターゲットのモックアップ(矢印は反射材)
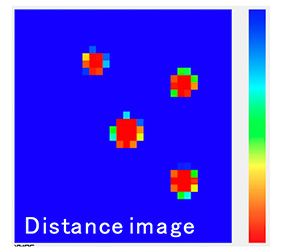
奥行き情報の計測結果
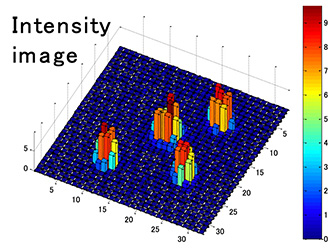
強度情報の計測結果
© JAXA
※本コラムは2020年12月時点の情報となります。

2007年入社。これまで主にスタースキャナやスタートラッカなどの光学姿勢センサおよびそれらの地上試験設備の研究開発に従事。2015年から現職。
宇宙航空研究開発機構 研究開発部門 第一研究ユニット 研究開発員
清水 成人