状況認識支援システムの研究開発(SAVERH)
トピックス一覧へ
- 2020年3月11日
- 「目隠し」で夜間飛行を模擬-SAVERH機能確認試験
- 2019年2月22日
- 2018年度から新たな研究フェーズに入ったSAVERHの機能確認試験
いつでも、どこでも、安全に飛行し、任務を達成できるようにする技術が求められています。雲、霧、雪や砂塵などによる一時的な視程の低下、夜間の飛行、パイロットの視野外に障害物が存在するといった状況においては、パイロットの状況認識が著しく低下し、ワークロードが増加し、エラーやそれに起因する事故が発生しやすくなります。一方、災害発生時や緊急時においてヘリコプターへの期待が強まっており、捜索、救助、輸送などを天候や気象によらず実施できることが必要です。
JAXAでは、パイロットの視覚情報が制限された環境(DVE: Degraded Visual Environment)におけるヘリコプターの運航安全性を向上させ、かつ任務の達成を支援するため、画像センサや距離センサなど各種センサの情報を適切なシンボルなどを用いてパイロットに表示提供する視覚情報支援技術(SAVERH-PRO)の研究を進めてきました。現在は、この技術を活用した状況認識支援システム(SAVERH)の開発を進めています。
事業の目的、目標
夜間、ホワイトアウト、ブラウンアウト等の視程障害が存在し、パイロットの視覚情報が制限された環境(DVE: Degraded Visual Environment)における、ヘリコプター運航の安全性を向上させることを目的とし、DVE補償技術を開発します。
- 中・近赤外線センサ(スマート暗視センサ)をSAVERHシステムに統合し、有効な視覚情報をパイロットへ提示する。
- スマート暗視センサならびにセンサ視野角と遅延を改善するマルチカメラ式センサポッド技術等を用いて、救助任務を模擬した対地50ftホバリングを安定的に実現する。
また、同時にパイロットインタフェース、画像合成、計器・誘導表示、障害物検知・表示などのシステム開発、プログラム開発を進め、飛行実験で評価を行なっていく予定です。
研究内容
概要紹介動画を掲載しました。
実際の飛行試験映像(2018年実施試験)とパイロットが被るヘルメットに表示される画面データを組み合わせて紹介しています。
<2019年12月13日掲載>
空中の一点にホバリング(滞空)することが可能なヘリコプターは、飛行機(固定翼機)のように離着陸に際して滑走路は必要なく、病人・けが人の救急搬送や災害時の物資輸送など、さまざまな場面で活躍しています。しかし、夜間や悪天候時などのように視界が確保できない状態での飛行は、送電線など地上の障害物を避けることが困難であり非常に危険です。そのため、いつでもどこでも安全に飛行して、与えられた任務を達成できるような技術が必要となります。
SAVERH(Situational Awareness and Visual Enhancer for Rescue Helicopter)は、災害時の救援や捜索救助活動を、夜間などでも安全に実施できるようにするため、パイロットに窓の外の状況や飛行状態を視覚情報として提示する技術です。

センサーポッド
周囲の情報を取得するために、JAXAの所有する実験用ヘリコプターの機外に赤外線カメラやレーザー距離計などのセンサーを搭載したポッドを取り付けます。
赤外線カメラは、夜間でも周囲の状況を撮影できるという特徴があります。赤外線カメラからの画像を、コックピット計器板のディスプレイやパイロットが装着したヘルメットマウントディスプレイ(HMD)に表示します。
レーザー距離計は、地上の障害物との距離を測定し、障害物の存在を視覚情報として表示します。パイロットは接触の危険がある送電線などの障害物の存在をいち早く察知し、これを回避することができます。
赤外線カメラやレーザー距離計を内蔵したセンサーポッドは、HMDの動きと連動し、パイロットが見た方向を撮影することができます。

ヘルメットマウントディスプレイ(HMD)

赤外線カメラ表示

レーザーによる障害物表示
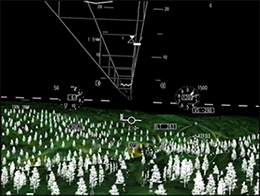
3D地形とトンネル誘導表示
また、地形データベースから生成した3D地形表示、精密な飛行誘導を行うためのトンネル型誘導表示を組み合わせることより、奥行き感や遠近感、高度感が得られるとともに、目的地までの飛行経路の認識を容易にすることができます。


