複数MAV協調運用による複雑任務対応能力の研究

複数MAVの連携飛行
JAXAでは、災害対応を目指した無人航空機技術の研究開発の一つとして、「複数MAV協調運用による複雑任務対応能力の研究」を進めています。屋内空間で複数の小型飛行ロボット(MAV: Micro Aerial Vehicle)が協調的に複雑なミッションを遂行するための基礎技術の研究開発を行い、全体システムの飛行実証をすることを目指しています。
屋内空間においてはGPS等の測位衛星(GNSS: Global Navigation Satellite System)の信号が使えないことや、通信の見通し線が確保できない問題、また、MAVの限られた飛行時間や少ないペイロード等、さまざまな技術的なハードルが存在します。そこで、GPSを用いずに自己位置を推定する技術や、複数機が協調して行動するための行動計画アルゴリズムの技術、また、狭い空間で機敏に飛行できるプラットフォームの飛行制御技術の研究等、関連する研究課題に取り組んでいます。
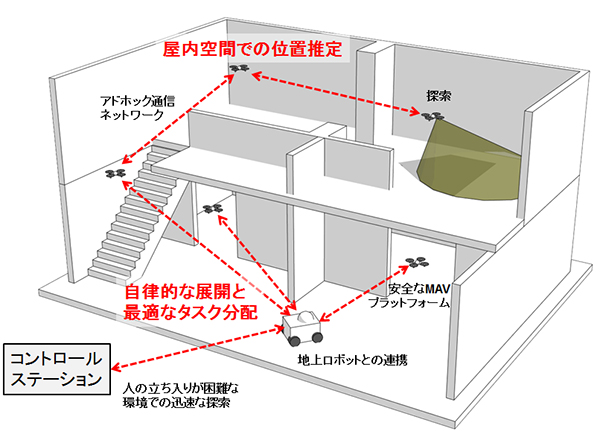
複数MAV協調運用の目指すシステムのイメージ
2019年4月16日更新
