災害・緊急時等に活用可能な小型無人機を含めた運航安全管理技術の研究開発(DOER、MASRAO)
トピックス一覧へ
- 2026年3月24日
- JAXA’s103号「JAXA TIMES」小型無人機の開発が進行中
JAXAでは、D-NETと呼ばれる災害や危機管理時に各防災機関の活動を一元的に管理・共有することを目的に開発した通信プラットフォームシステムの研究開発を災害対応・危機管理対応を行う省庁等と連携して行ってきました。
2024年1月に発生した能登半島地震においても、消防庁との技術協力の推進に係る取り決めに基づき、JAXA職員を石川県庁の災害対策本部に派遣してD-NETによる技術支援を実施しました。この技術支援により、被災地内での無人機も含めた航空機運用、特に情報共有体制が課題であることがより明らかになりました。また、無人機自体の機能・性能向上も重要であることが明らかになりました。Kプロ運航安全管理技術で提示されている課題も含めて、能登半島地震で明らかになった課題の解決を目指して、今後JAXAではDOERプロジェクト、MASRAOと呼ばれる事業を実施します。
能登半島地震時における航空調整
DOER/MASRAO研究開発の背景
経済安全保障推進会議及び統合イノベーション戦略推進会議の下、内閣府、文部科学省及び経済産業省が中心となって、府省横断的に、経済安全保障上重要な先端技術の研究開発を推進する、「経済安全保障重要技術育成プログラム(K Program)」と呼ばれる制度があります。
Kプロ運航安全管理技術における課題①運航安全管理技術課題②小型無人機技術に研究機関・企業・大学と連携して応募し、採択されました。
Kプロは、JSTの指揮・監督のもとで研究開発を進めていきます(https://www.jst.go.jp/k-program/program/koukuu1.html)。
Kプロ運航安全管理技術のなかで課題として主に下記内容が挙げられています。
これらの課題を解決し、我が国の災害・緊急時に対する対応能力の飛躍的な向上に貢献するために、JAXAではK Programで採択された内容とJAXAの災害対応航空技術の研究開発活動をあわせて、「災害・緊急時等に活用可能な運航安全管理システム及び小型固定翼無人機システムの研究開発(DOER)」と「災害・緊急時に活用可能な小型VTOL無人機システムの研究開発(MASRAO)」を今後進めていきます。
研究開発目的と実現したい運用
DOER/MASRAOでは、有人機・無人機の統合的な運航管理を行う運航安全管理システムの研究開発と、長時間・長距離の飛行が可能となる小型無人機システムの研究開発を行います。
JAXAでは、災害・緊急時対応を行う有人機や無人機を運用している府省庁や自治体のニーズ、またK Programの研究開発構想を踏まえ、災害・緊急時及び警備警戒において、有人機・無人機が連携して安全に任務を遂行することを目的とした下記3種類の運用モデルを設定しました。
| ・運用モデル(警備): | 有人機及び無人機を運用する機関に対し、特定の省庁が一元的な統制・調整を行うためのモデル。 |
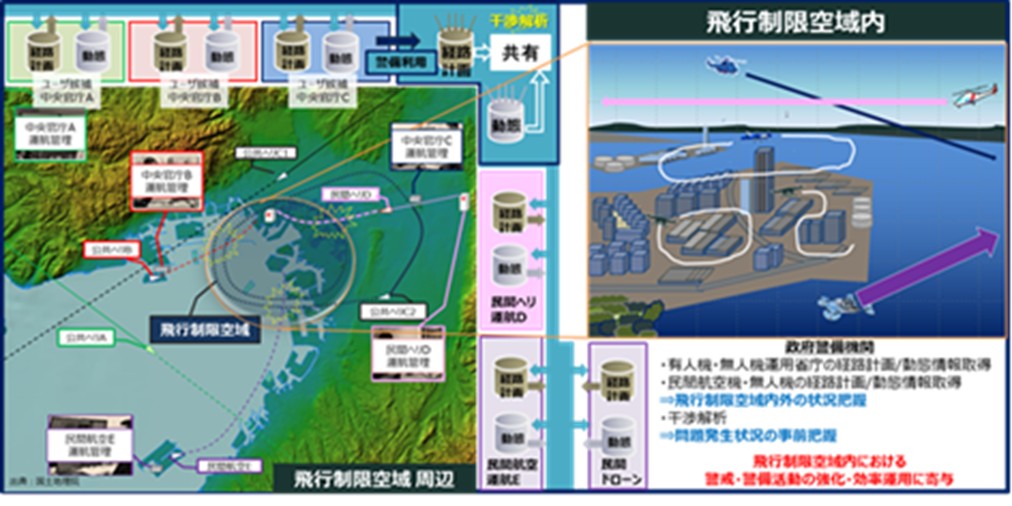
| ・運用モデル(災害): | 災害対応を行う有人機及び無人機の運用調整に際し、中央政府各省庁と地方自治体間の相互連携を可能とするモデル。 |

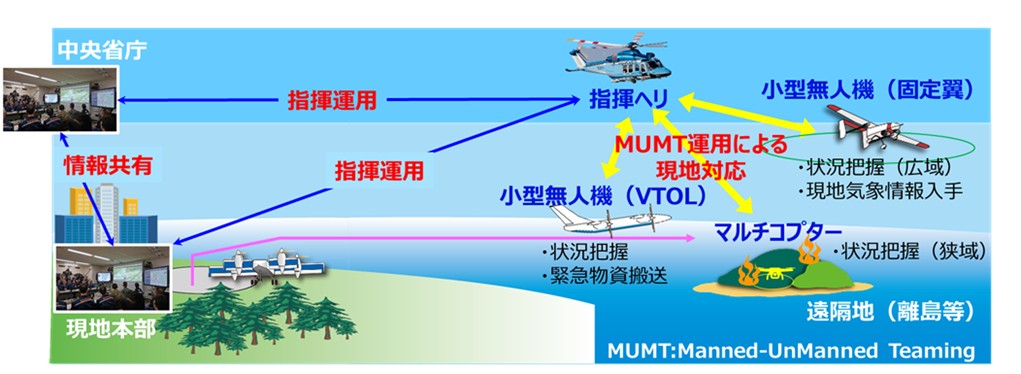
| ・運用モデル(遠隔地): |
無人機に対して、有人機あるいは地上指揮機関からのリアルタイムな任務指示を可能とするモデル。遠隔地における災害・警備において通信環境の制約から現場判断が主となるため、MUMT※(Manned-UnManned Teaming)の実現が望まれている。
※ MUMT:特定の有人機が現地で無人機の指揮を執る形態 |
研究開発する運航安全管理システムと小型無人機システムのロードマップ
DOER/MASRAOでは、有人機・無人機の統合的な運航管理を行う運航安全管理システムの研究開発を2028年度末まで、また、長時間・長距離の飛行が可能となる小型無人機の研究開発を2025年度末まで実施する計画です。
また、研究開発をする技術は、2025年度の運用モデル(警備)実証、2026年度、2027年度の運用モデル(災害)実証、2028年度の運用モデル(遠隔地)実証の段階的な実証を経て成熟度を上げる計画となっています。

DOER/MASRAOで研究開発する運航安全管理システム
運航安全管理システムは、2023年度末まで研究開発を進めてきたD-NETの成果を活用してから2028年度末までの5年間で研究開発を行う計画です。D-NETのこれまでの研究開発については別ページをご確認ください。
(1) 公的利用有人機・無人機運航管理アーキテクチャ
(2) 有人機サブシステム
(3) 統合運用サブシステム
(4) MUMT連携サブシステム
DOER/MASRAOで研究開発する小型無人機システム(小型固定翼無人機システム)
小型固定翼無人機システム(MASRAO-α)は、2024年度から2026年度までの3年間で研究開発を行う計画です。主な目的は下記3点です。
a) 遠隔地での情報収集に利用可能な小型固定翼無人機システムを研究開発する。
b) 有人機連携運用MUMT(Manned-UnManned Teaming)対応の飛行モードを開発する。
c) 第一種機体認証安全基準に適合する耐久性・安全性を有する設計法を構築・検証する。

災害・危機管理対応統合運用システム(D-NET3)
ヘリコプター等の航空機、無人航空機、人工衛星の統合的な運用による災害情報の収集・共有化と、災害救援航空機による効率的かつ安全な救援活動を支援するための研究開発を進めています。
DOER/MASRAOで研究開発する小型無人機システム(小型VTOL無人機システム)
小型VTOL無人機システム(MASRAO-κ)は、2024年度から2025年度までの2年間で研究開発を行う計画です。主な目的は下記3点です。
a) これまでJAXAで研究開発してきた4発ティルト翼技術をベースに、アウトプット目標をすべて満たす「多発タンデムティルト翼VTOL」を開発する。
b) 第一種機体認証安全基準に適合するためのVTOL設計・証明法を構築・検証する。
c) 連携飛行のための自動化機能を開発し、有人機との連携運用の高機能化を可能にする。

MASRAO-κの飛行試験
大樹航空宇宙実験場にて、電動多発タンデム・ティルト翼VTOL無人機システムMASRAO-κの飛行試験を実施しました。
小型無人機の自動飛行・ミッション性能向上技術の研究開発
小型無人航空機の運航安全と任務能力向上のための研究開発と、運航需要の拡大に対応する効率性、環境適合性向上に重点化した運航技術の研究開発を行っています。