4発ティルト・ウィングVTOL機
トピックス一覧へ
JAXAでは、4発ティルト・ウィング(QTW: Quad Tilt Wing)VTOL機について、無人航空機を対象にして基礎研究を行ってきました。
ティルト・ウィングは、ティルト・ローターとは違い、翼そのものの向きを変え、垂直離着陸時は翼及びプロペラを上向きに、巡航時には翼とプロペラを前向きにすることで、VTOLを可能にする航空機です。ティルト・ローターに比べて、高い巡航効率で飛行でき、またローターを用いないことから機構をシンプルにできます。
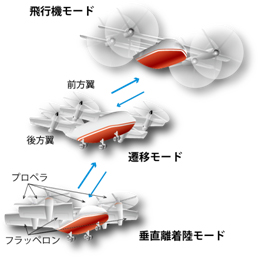
QTW飛行プロファイル
QTW無人機の研究では、機体の飛行特性解析や制御系の開発を進め、飛行実験にて垂直離陸から加速遷移、巡航、減速遷移、垂直離陸までの完全遷移を安定して達成できることを実証しています。
航空新分野創造プログラム(Sky Frontier)では,将来このようなVTOL機が旅客機として実現することを目指して、安全性や巡航性能の向上に焦点を当てて、更なる研究開発を実施しています。

QTW無人航空機

QTW無人航空機の遷移飛行
