次世代空モビリティの協調的運航管理技術の研究開発(CONCERTO)
トピックス
ドローンや空飛ぶクルマ等の次世代空モビリティの運航実現に向けた動きが加速しています。ドローンは有人地帯での補助者なし目視外飛行(レベル4飛行)が始まり、空飛ぶクルマは2025年の大阪・関西万博での飛行実現を目指した機体開発、制度整備が進んでいます。
JAXAは、ドローン・空飛ぶクルマ・既存航空機の統合的な運航管理システムの開発を目指し、2022~2026年度の約5年間の計画で「次世代空モビリティの協調的運航管理技術の研究開発(CONCERTO)」に取り組んでいます。CONCERTOは、新エネルギー・産業技術総合開発機構(NEDO)の「次世代空モビリティの社会実装に向けた実現プロジェクト(ReAMoプロジェクト)」におけるNEDOからの受託業務が主体となっており、国内企業や関係省庁と緊密に連携して研究開発を進めています。開発した技術は国際標準化や国内企業への技術移転を行い、次世代空モビリティの発展と国内産業の振興に貢献します。
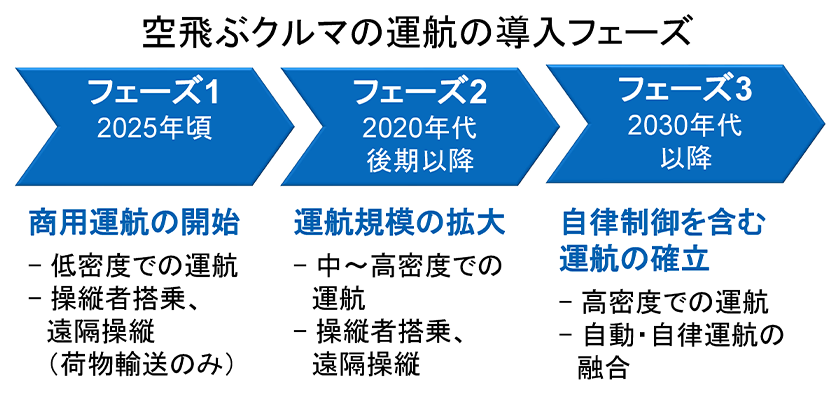
空飛ぶクルマの運用コンセプトConOps
国交省と経産省が設置した「空の移動革命に向けた官民協議会」は、空飛ぶクルマの運用概念(ConOps)を策定し、2030年代にかけて空飛ぶクルマの運航を段階的に成熟させていく方針を示しました。大阪・関西万博を含むフェーズ1では、主に既存の空域や飛行方式を活用した低密度での運航となります。2020年代後期以降のフェーズ2では、一部の都市環境において従来の航空機運航よりも高密度の運航が始まり、遠隔操縦による旅客輸送の導入も想定されています。2030年代以降のフェーズ3では、さらに高密度での運航にスケールアップし、自動・自律運航の拡大が想定されています。
CONCERTOが取り組む主な研究開発
CONCERTOでは、主に空飛ぶクルマの運航の導入フェーズ2以降を見据えた、ドローン・空飛ぶクルマ・既存航空機の統合的な運航管理システムのアーキテクチャ設計とコア技術の開発を目指し、以下①~③の研究開発に取り組んでいます。
① 統合的な運航管理システムのアーキテクチャ設計
ステークホルダ(メーカ、運航者、関係省庁等)と共に、空域シミュレータを活用して統合的な運航管理システムのアーキテクチャ設計を行い、システムの要求性能を設定する。
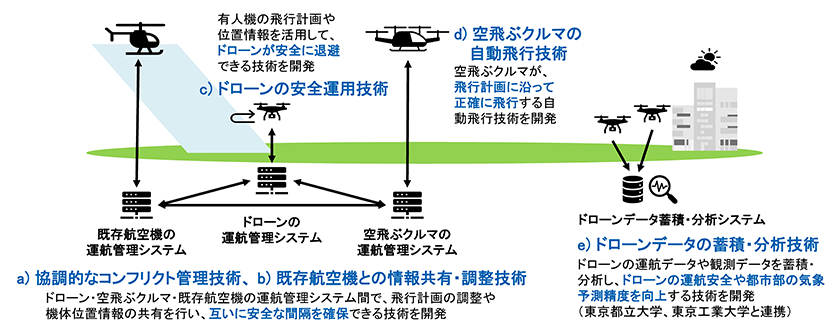
② 統合的な運航管理システムのコア技術の開発
統合的な運航管理システムのコア技術となる、a) 協調的なコンフリクト管理(衝突回避)技術、b) 既存航空機との情報共有・調整技術、c) ドローンの安全運用技術を開発する。また、d) 空飛ぶクルマの自動飛行技術や、e) ドローンデータの蓄積・分析技術にも取り組む。
③ 統合的な運航管理システムの検証・評価
国内企業と連携して、統合的な運航管理システムのプロトタイプを開発する。JAXAが有する実験用ヘリコプタや空域シミュレータを活用し、プロトタイプが要求性能を満たしているか検証・評価を行う。飛行実証を含む検証結果をベースに、早期の国際標準化や技術移転につなげていく。
※本研究の成果の一部は、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の委託業務(次世代空モビリティの社会実装に向けた実現(ReAMo)プロジェクト)の結果得られたものです。